Uploaded
Submitted by: tarzan Project Website: https://picaxe.multiply.com/photos/album/7/Robot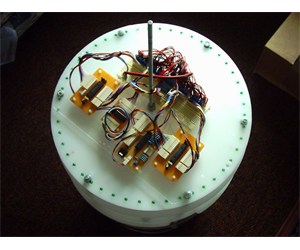
Uploaded
Submitted by: tarzan Project Website: https://picaxe.multiply.com/photos/album/7/Robot
What lays beneath the dome? 48 green LEDs around the perimeter project a flame like glow on the underside of the large dome lid on this robot named Mr Egghead.
Control of light show is via i2c Picaxe 28X and two MAX6956 20x I/O ports with LED drivers plus portb outputs/ULN2803 to drive the remaining eight LEDs.
This robot has a sturdy frame made up of 6mm threaded rods and a later addition of aluminum tube slid over the rods with loading washers to support the Perspex disks. The disks where cut out using a standard drill press; I set a pivot point half the diameter of the dome (light shade) plus 3mm half the 6mm router bit to the center of the drill chuck. Adjusting the cutting depth after rotating by hand until cut half way through then flipping over the disk and finishing from the other side. These are some of things I get up to with a limited toolbox.
Drive is via stepper motors with home made gearbox housings, wheels are training bike out riggers and have very good traction on all surfaces. I have two caster wheel sets front and rear with height adjustment so that with a little recess adjustment it can get over small bumps on the ground surface. It’s best on flat indoor surfaces. The original stepper drivers are now on my ROV4x4 robot but they did a very good job of driving this heavy weight around. It had good torque and speed, two 12 Volt batteries in series provided 24 Volts with current limiting circuits, gearbox ratio and the right diameter wheels made for an ideal setup. I now have two Little Step-U stepper motor drivers to use with this robot but no batteries at this time, I will get a LiPo multi cell unit this will reduce the weight considerably.
This robot has been through many incarnations and is awaiting its next, most likely to have maze solving ability.

Share