Uploaded
Submitted by: jinx Project Website: https://www.youtube.com/watch?v=8j0UJqrzUF4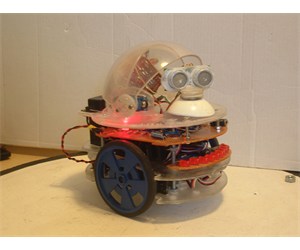
Uploaded
Submitted by: jinx Project Website: https://www.youtube.com/watch?v=8j0UJqrzUF4
hi, i made this desktop bot to help me better understand some of the feature of the picaxe and picaxe basic.
Luna is a servo (factory mod) differential drive system with a castor ball at the back with 2 mircoservos to control the hood and pan the servos.
There is a 14m2 which takes care of the input control, 5 brass drawing pins for touch sensor and an infra-red sensor which serially sends commands to a picaxe 28x2.
The 28x2 controls the servos, srf005 ultra sound, rgb floor lighting and the i2c bus which sends commands to the led chaser.
The led chaser is a 20x2 as a slave on the i2c bus.
Please see the video for more information
t jinx

Share