Uploaded
Submitted by: tarzan Project Website: https://picaxe.multiply.com/photos/album/1/4x4_ROV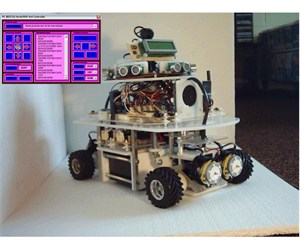
Uploaded
Submitted by: tarzan Project Website: https://picaxe.multiply.com/photos/album/1/4x4_ROV
Target Environment:
Indoors & Outdoors
Sensors / Input Devices:
A/V Camera (2.4 GHz)
6 Ultrasonic Range Finders (SRF004)
4 Digital Temperature Sensors (DS18B20)
433 MHz Single Chip RF Transceiver (RF-NRF401)
Control Method:
PC VBA via radio link (433MHz)
2x 28X Picaxe (PIC16F873A)
CPU Type:
4x 28X Picaxe (PIC16F873A)
Master & 3x Slaves
Programming Language:
Picaxe Basic
Time to build:
Six months
Locomotion Method:
4x Wheels each driven by its own stepper motor (4x4 rubber tires)
Actuators / Output Devices:
4 stepper motors (Drive wheels)
Futaba Servo S3003 (Camera)
Speech Synthesizer (SPE030)
2x16 line LCD display with backlight
piezo noise maker
Power Source:
7.2 Amp 12V Battery
Operating System:
Picaxe Bootstrap Basic Interpreter
Weight:
7 Kilograms
Cost to build:
Estimate $1,500 NZ
This 4x4 robot has steering at both ends and each wheel is driven by its own stepper motor. The front and rear trucks pivot from the plates attached to the battery allowing up and down travel also right to left to steer. There are two 10K Trimpots to read steering head angles at 10bit resolution.
I have created a GUI using VBA (Visual Basic for Applications) to control my robot. Communication is via Serial port (RS232) through two Picaxe 28X (PIC16F873A) chips to a 433 MHz Single Chip RF Transceiver (RF-NRF401). The GUI has buttons to control: direction, camera, speech, distance, sound and to get information such as: distance to object and temperature of stepper motors. And several other functional buttons.
It speaks (1 to 30) predefined messages stored in memory using the text to speech module (SPE030), plays tunes and makes noises through a piezo. It has an Audio/Video Unit sending signals to the receiver. The LCD displays commands received and various other information. Information that the robot can relay back to the PC includes all valid commands, distances from the six Ultrasonic Range Finders (SRF004) all in one sequential shot or individually and running temperature (DS18B20) of each stepper motor.
Using the Ultrasonic Range Finders to set the distance to be traveled it can move to within 1cm distance of the object in question. This is possible because the use of stepper motors, to drive it precisely the distance required to reach the object. PCBs: The four-stepper motor pcbs, four 28X Picaxe pcbs and LCD back board pcb I made myself.
Tires: difficult to find the right kind it needs larger diameter wheels for better ground clearance, the wheels on it at the moment are not ideal.
Early in the development the backbone concept was adopted. Which would have allowed for two 12V batteries in series to power the stepper motors. With current limiting circuits it would produce more torque than it currently has with the single 12V supply. The single battery (stressed member) design came about because I wanted long duration missions. Having a 12V-7.2AH/20HR battery on hand I decided to press it into service. Probably the wrong choice.

Share